RRT with visual heuristics
Designing and developing a path-finding RRT algorithm with heuristics based on a visual classifier.
Problem Domain
- Domain is a 2D maze with obstacles the agent must go around to reach the goal.
- Discrete action space - front, back, left, right, move, stop.
- Different variants of domain include static/dynamic obstacles, start locations, and goal locations.
Implementation
- Expert trajectories are automatically generated for the image classifier.
- Base RRT is run in a dynamic or static environment to find an expert trajectory.
- Every step along this trajectory from start to goal, the picture of the environment is saved along with the action taken by the agent as training/test data for the image classifier neural network.
- A CNN model is trained with this data to predict action from current state.
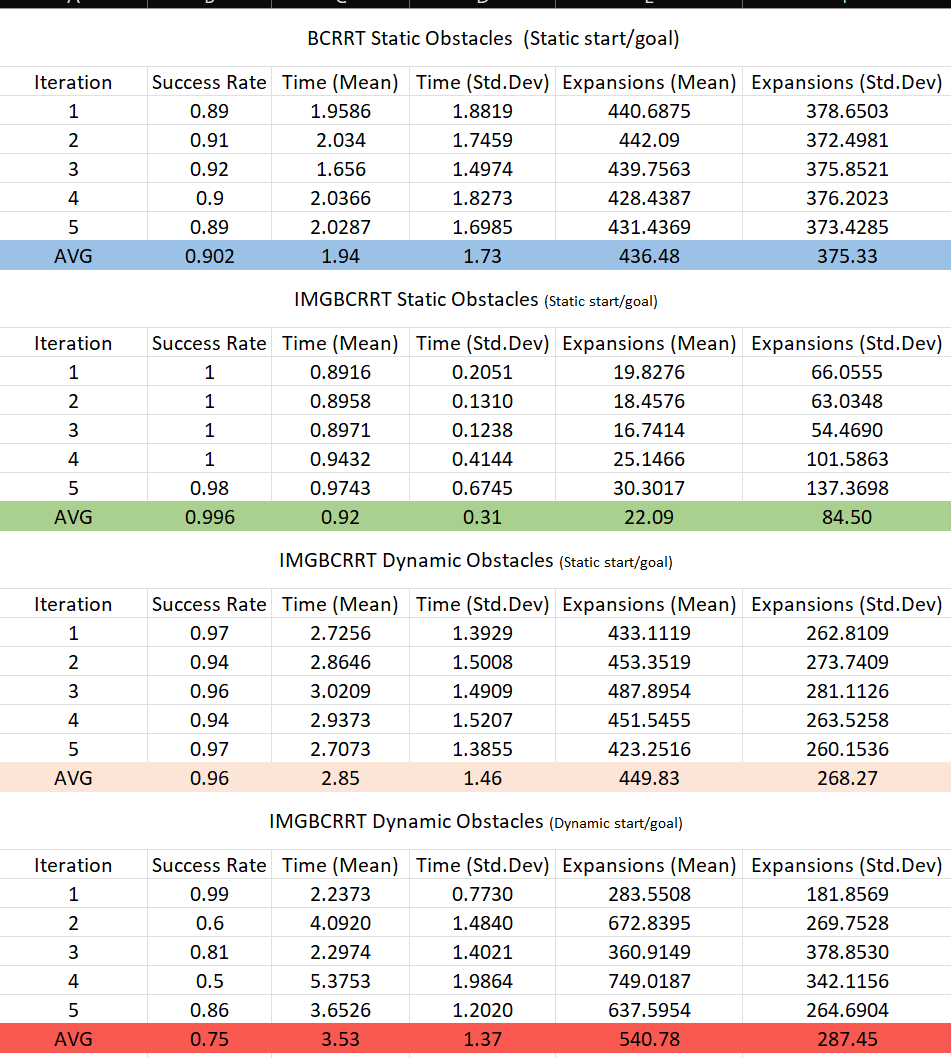
Results